




Καλέστε μας στο Call Us +357 22454333

Unmanned Surface Vehicle
Compact Maritime Surveillance Platform
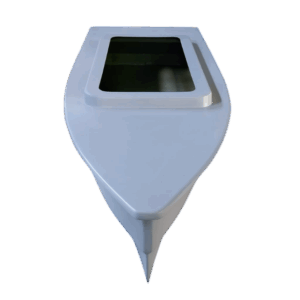
SARISA is a compact, rapidly deployable Unmanned Surface Vehicle designed for port and harbor security, coastal surveillance, and maritime patrol missions. With a length of 2 meters and weighing just 40 kg, it provides persistent surveillance capability at a fraction of crewed vessel costs. The low-profile hull design reduces radar cross-section for covert operations, while dual electric propulsion delivers reliable performance with minimal acoustic signature.
Length | 2 m (6.6 ft) |
Weight | 40 kg (88 lb) |
Powertrain | Dual Electric |
Max Speed | 30 km/h (16 kts) |
Endurance | 3-4 hours |
Defence |
• Port & Harbour Security |
• Coastal Surveillance |
• ISR Operations |
• Critical Infrastructure Protection |
• Force Protection |
• Maritime Domain Awareness |
Commercial |
• Asset Inspection |
• Environmental Monitoring |
• Search & Rescue Support |
• Hydrographic Survey |
• Security Patrol |
• Event Monitoring |
SARISA is operated via a portable ground control station with directional antenna for extended range communications. The rugged, field-deployable unit provides real-time telemetry, video streaming, and mission planning capabilities. Operators can define patrol routes, survey areas, and waypoint missions through an intuitive interface.
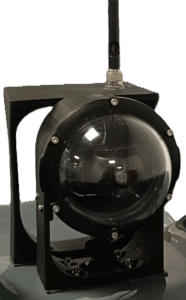
The modular payload bay accommodates mission-specific sensors including electro-optical cameras with pan-tilt capability, GPS positioning, and inertial measurement units. The weatherproof camera housing provides continuous video feed for surveillance and object detection. Current development focuses on AI-enhanced classification capabilities for automated threat identification.
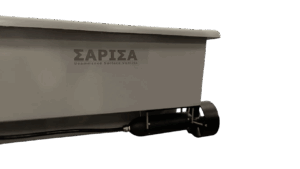
Dual electric thrusters rated at 45A provide a maximum speed of 30 km/h and operational endurance of 3-4 hours. The twin-screw configuration enables differential thrust steering for enhanced maneuverability in confined harbor environments. Electric propulsion offers reduced acoustic signature compared to internal combustion alternatives, supporting covert surveillance operations.
SARISA is developed entirely in-house by RTD TALOS, from hull design through mold fabrication to final assembly and sea trials. The fiberglass composite hull is manufactured using precision molds, ensuring consistent quality and enabling rapid production scaling. This vertical integration provides full control over platform specifications and rapid iteration based on end-user feedback.
SARISA development aligns with European Defense Fund 2026 priority areas:
Naval Combat: Enhanced semi-autonomous surface vessels (€90M)
Underwater Warfare: Critical seabed infrastructure protection (€40M)
Digital Transformation: AI-based tactical situational awareness (€70M)
The platform addresses Cyprus’s strategic maritime security requirements, including protection of critical infrastructure such as offshore energy installations and expanding port facilities.
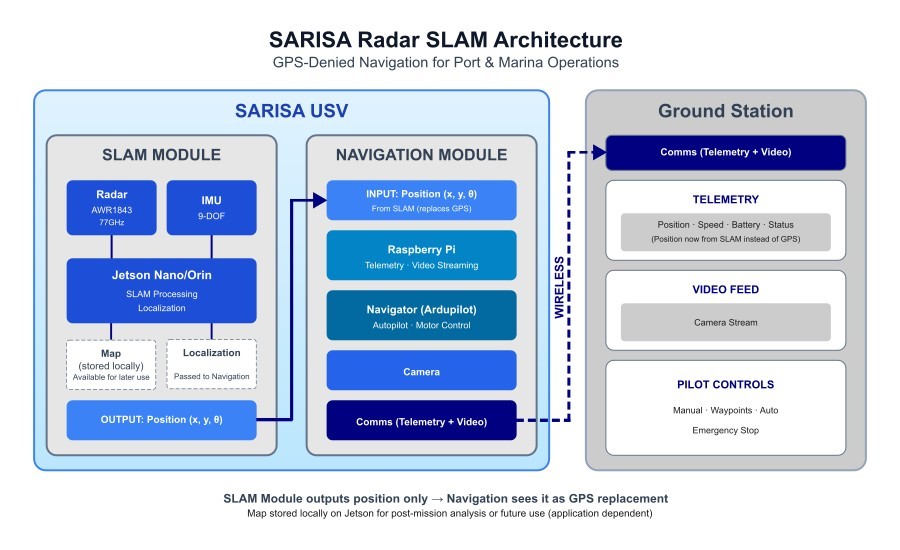
The next development phase of SARISA focuses on integrating a Radar SLAM system for GPS-independent navigation in port environments.
The Problem: Ports and marinas present significant GPS challenges — multipath interference from buildings and metal structures, as well as jamming and spoofing threats.
The Solution: A standalone SLAM module with mmWave Radar (TI AWR1843) and edge processor (Jetson Nano) providing position localization independent of satellite navigation. The system acts as a “virtual GPS” for Ardupilot, requiring no changes to the existing architecture.